It's 1:30 AM and I just came in from my garage where I was testing and debugging the Dethinator. It works pretty well. I straightened out the drive system (hooray for reading user's manuals!) and I think I fixed my radio connect twitch. Anyways, I didn't make any CHANGES, I just debugged the electronics, and put it together for real and ran it, so we still have the same to-do list.
You can't put the throttle up more than halfway, and I'm still not sure why, but I'm sure we'll figure it out. :/
Anyways, I'll cut to the chase. :P
here's a photo of the insides, and a video of my testing.
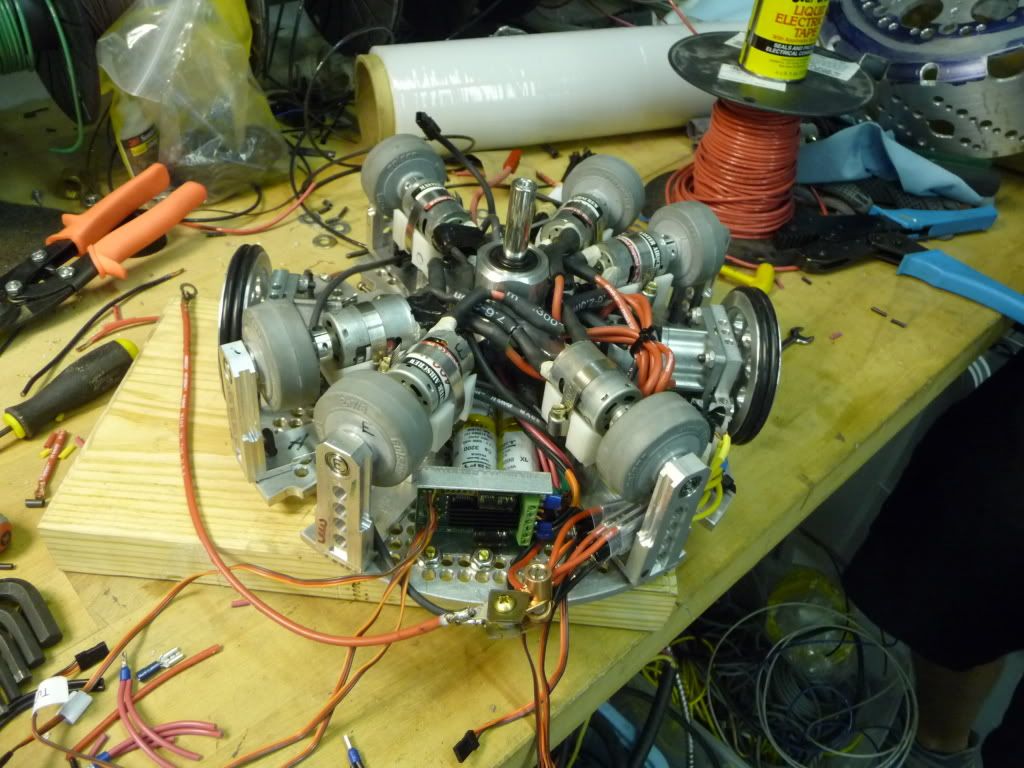
you know you're impressed by this massive tangle of wires...
6 comments:
Dan. Read page 5 and 6 of this manual
http://spektrumrc.com/ProdInfo/Files/DX5eUsersGuideV2.pdf
explains how the AR500 Failsafe is set during binding and how that should prevent unintentional movement during startup.
As for the throttle thing with it not being able to go above 1/2 throttle, that is probably a speed controller thing. Will get back to you on that.
Gah...
http://spektrumrc.com/ProdInfo/Files/DX5eUsersGuideV2.pdf
WTF?
http://spektrumrc.com/ ProdInfo/Files/DX5eUsersGuideV2.pdf
remove the space
When it's spinning,how can we know which way the bot will go if we want it to go forward? I mean it's a symmetrical cylinder and we don't know the direction of the wheels.
^^^ we can use the tape...or insert a playboy. Either would work to tell which direction is forward.
^^^Needs to spend less time on AFF: By Playboy do you mean something I don't know or the magazine...because I'm sure Alan has the latter.
Post a Comment